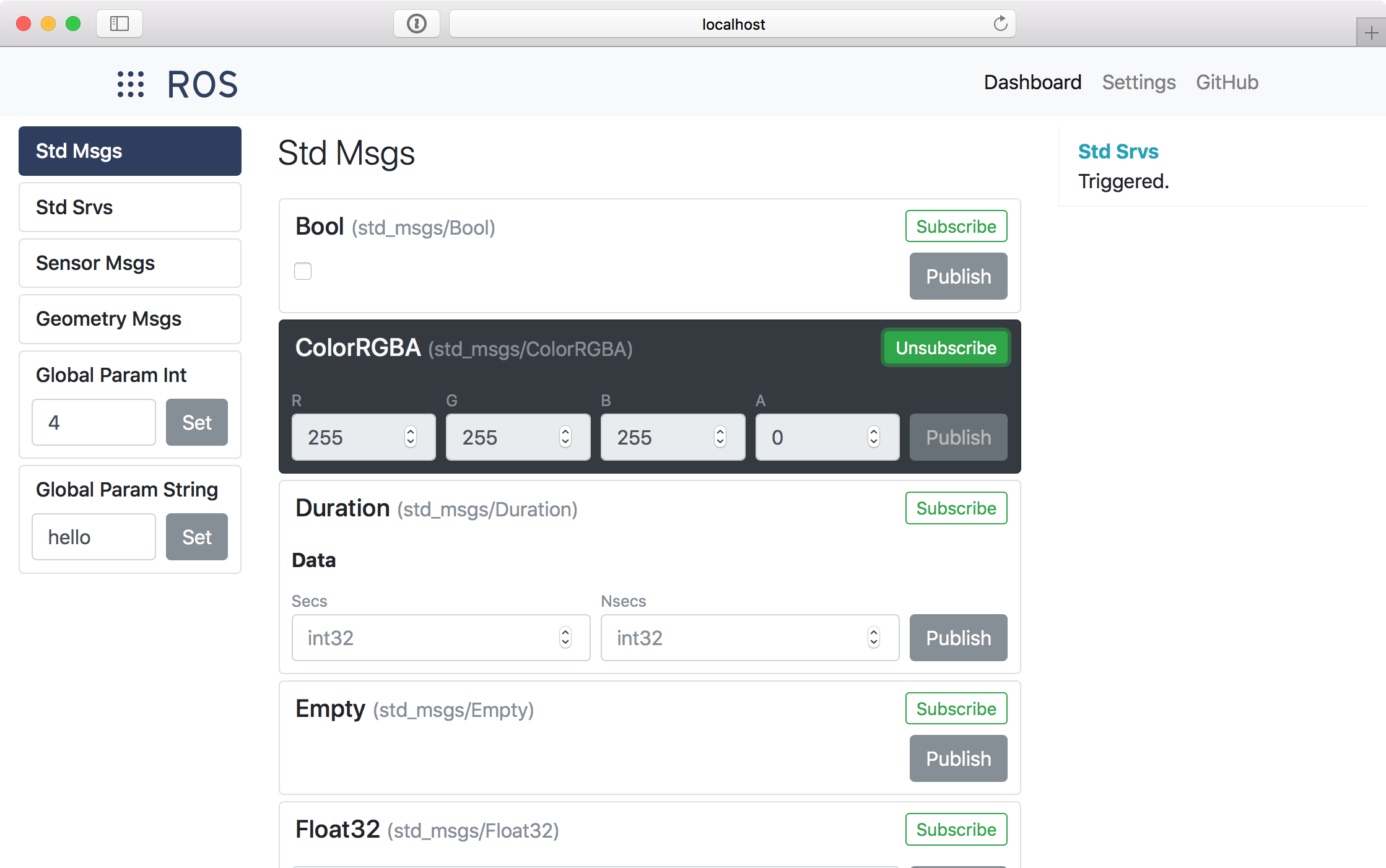
该控制中心是控制运行ROS的机器人的通用工具。它使用 websocket 连接并roslibjs通过RobotWebTools在浏览器中运行。
roslibjs
webrtc_ros是一个基于ROS(RobotOperatingSystem)的软件包,用于在ROS[…]
与 ROS JavaScript 库结合使用的 2D 可视化库
FoxgloveStudio是一个用于ROS系统的实时数据可视化和调试工具。它提供了一个直观的用户界面,可以[…]
一个基于React和regl构建的轻量级、可扩展的 2D 和 3D 场景渲染器
与 ROS JavaScript 库结合使用的 3D 可视化库
标准 ROS JavaScript 库