











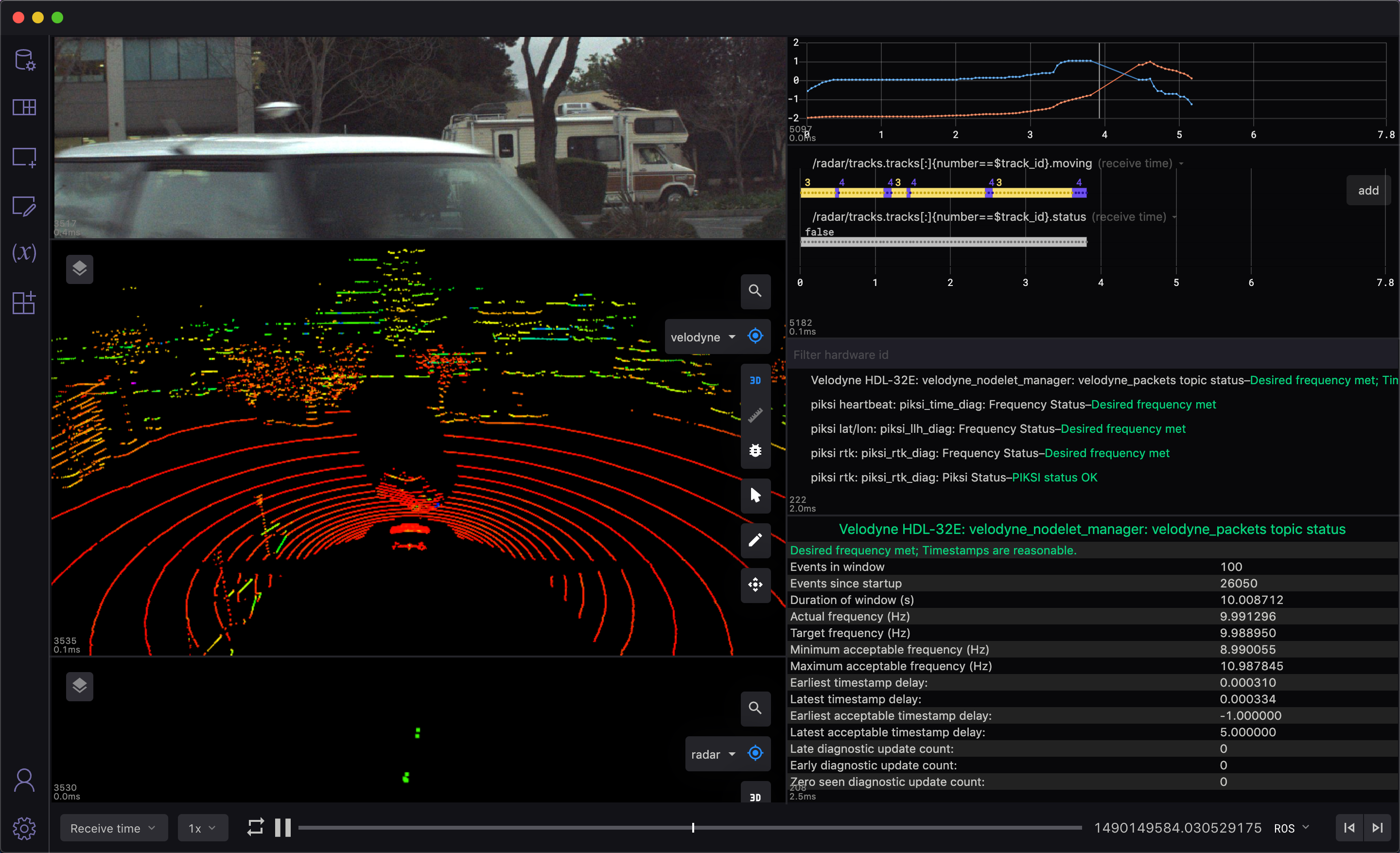
Foxglove Studio是一个用于ROS系统的实时数据可视化和调试工具。它提供了一个直观的用户界面,可以帮助开发人员可视化和分析ROS系统中的传感器数据、机器人状态和消息流。
使用Foxglove Studio,您可以轻松地创建自定义的工作区(workspace),并将多个ROS主题(topics)和服务(services)添加到工作区中以进行监视和调试。它支持常见的ROS消息类型,如图像、点云、激光扫描等,并提供交互式图表、视图和控制面板等功能。
除了数据可视化和调试功能外,Foxglove Studio还支持ROS节点(nodes)的控制和远程调用。您可以使用它来启动、停止和监视ROS节点,并通过服务调用、参数设置和终端命令等方式与程序进行交互。
可以在桌面电脑的浏览器中运行Foxglove Studio,无需安装任何额外的软件或插件。它还提供了一些实用的功能,如数据录制和回放,以及与团队成员共享工作区和数据的能力。
总体而言,Foxglove Studio是一个功能强大的ROS工具,可帮助开发人员实时可视化和调试ROS系统中的数据,提高开发效率并加快错误排查的速度。
相关导航

暂无评论...