











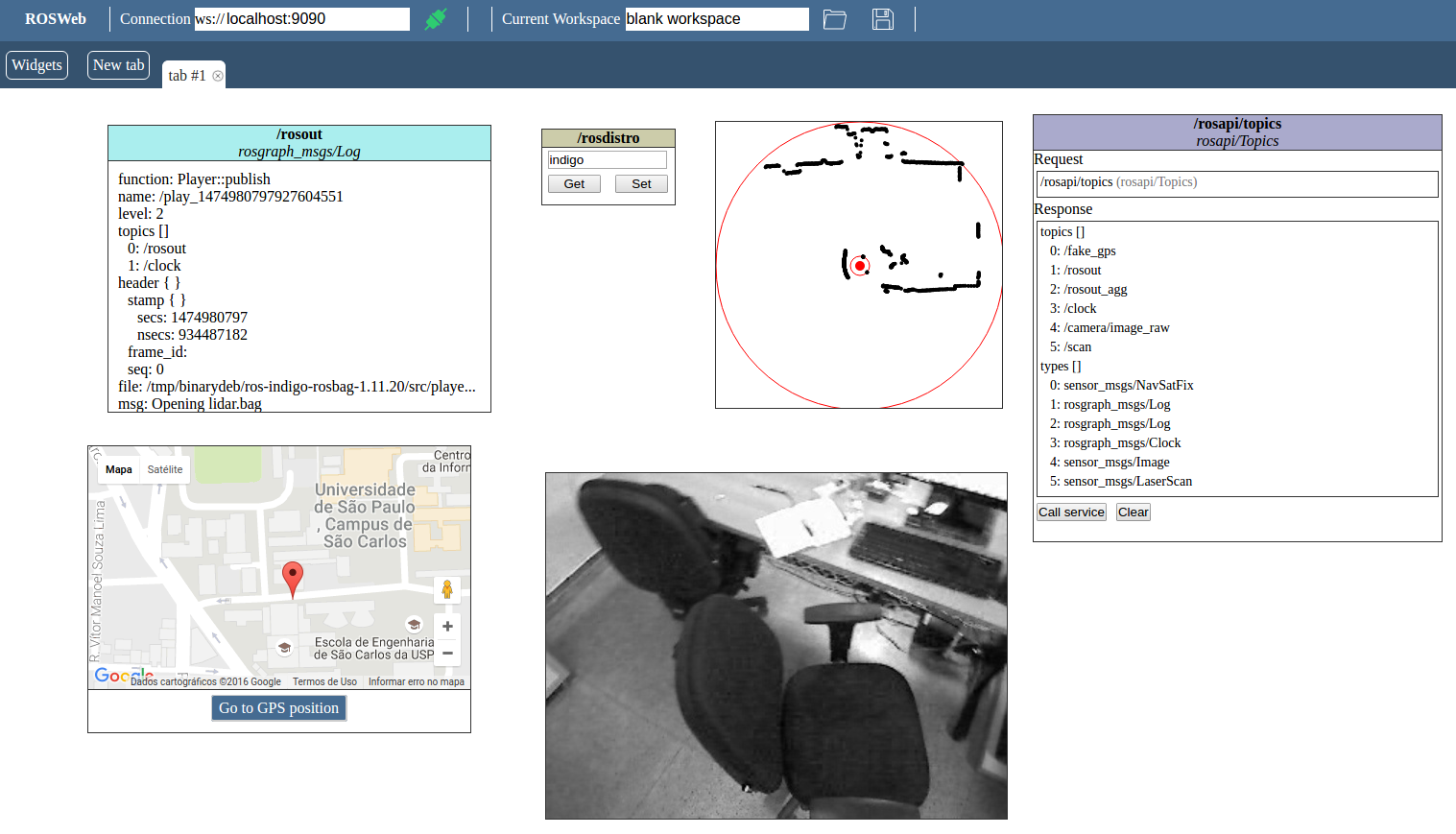
ROSWeb是一个基于Web的工具,用于可视化和操作ROS(Robot Operating System)系统。它提供了一个直观的用户界面,可以在浏览器中访问,并与ROS系统进行交互。
ROSWeb的主要功能包括:
- 可视化:ROSWeb可以可视化ROS系统中的消息、话题、服务和节点等。用户可以通过ROSWeb查看和监控实时的ROS系统状态,例如消息发布、话题订阅和服务调用等。
- 操作和控制:ROSWeb允许用户执行一些控制和操作操作,例如启动和停止ROS节点,调用ROS服务,发送控制命令等。这使得用户可以通过ROSWeb与ROS系统进行实时交互和控制。
- 仿真和调试:ROSWeb支持ROS系统的仿真和调试。用户可以通过ROSWeb模拟机器人的运动、传感器数据和环境,并进行调试和测试。
- 数据可视化:ROSWeb提供了数据可视化的功能,用户可以以图表、图像、地图等形式展示ROS系统中的数据。这对于分析和理解ROS系统中的数据非常有用。
- 多用户协作:ROSWeb支持多用户协作,多个用户可以同时访问和使用ROSWeb,共享工作区和数据。这促进了团队协作和开发。
总之,ROSWeb是一个功能强大的基于Web的工具,它为用户提供了一个直观的界面,方便地可视化和操作ROS系统。通过ROSWeb,用户可以轻松地与ROS系统进行交互、控制和调试,并可视化ROS系统中的数据。
相关导航

暂无评论...