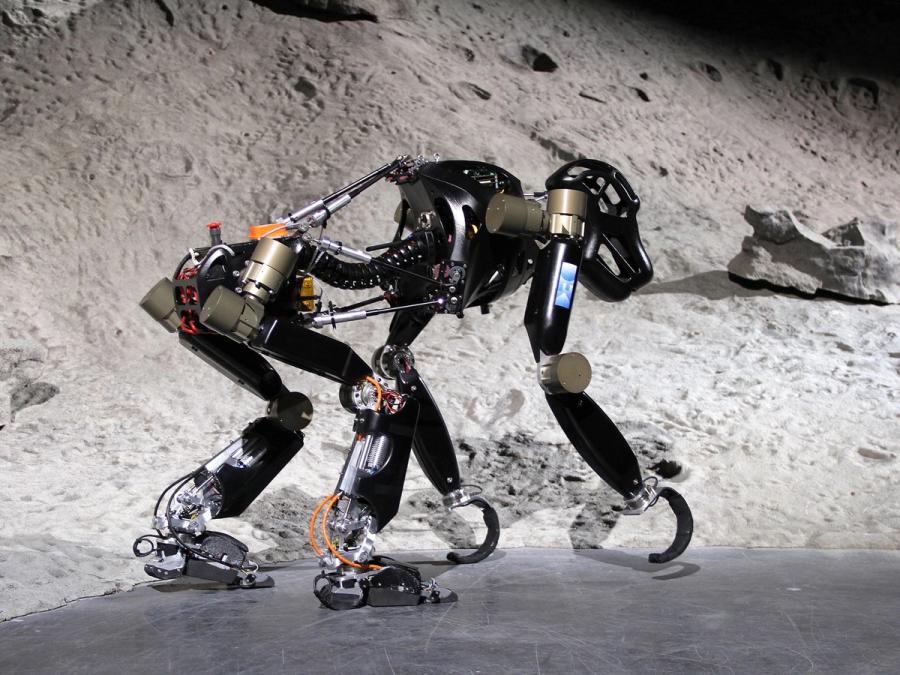
查理是一个有腿机器人,可以在四足和双足运动之间切换。就像黑猩猩一样,它用四肢移动,当它需要抓住东西时,它会使用前肢。
团队:DFKI机器人创新中心时间:2012年国家:德国类别:类人,研究特征:移动,模仿生,腿
<span data-mce-type="bookmark" style="display: inline-block; width: 0px; overflow: hidden; line-height: 0;" class="mce_SELRES_start"></span>